Uso de Dispositivos de Realidade
Virtual
Para
saber nais sobre o funcionamento
de rastreadores de posição e suas
características,
você pode consultar a página da disciplina de Tópicos
Especiais e Computação Gráfica
da PUCRS.
A
utilização de um dispositivo
de realidade virtual é feita através da
classe SmVR_CDevice.
Cada dispositivo a ser usado deverá possuir uma classe
específica,
derivada da SmVR_CDevice.
Na versão atual
SmallVR possui
drivers para três dispositivos:
-
Rastreador de
Orientação Iglasses;
-
Rastreador de
Posição e Orientação
Isotrack II;
-
Rastreador CyberTrackII.
- Emulador de Rastreador de Posição FakeTracker.
A idéia central
por trás do
uso de um rastreador de posição é a
criação
de um obeto O da classe SmVR_CGeometricObject
que
reproduza o movimentos do rastreador e a posteriro
adição
de outros obejtos como filhos deste objeto O.
As novas versões dos rastreadores utilizam threads para a
leitura dos dados, uma vez que os dados são lidos da porta
serial e isto acabava comprometendo o desempenho das
aplicações quando utilizavam os dispositivos.
1. Rastreador de
Orientação
do Óculos IGlasses
No caso de um Iglasses
a classe
derivada que o controla chama-se
SmVR_CIGlasses. A seguir apresenta-se
um exemplo de utilização desta classe.
Inicialização
Primeiramente deve-se incluir
o header file
correspondente ao driver do dispositivo que se deseja utilizar:
#include
"Devices\IGlasses\SmVR_CIGlasses.h"
A partir disto,
cria-se um objeto da classe
SmVR_CDevice
e
inicializá-lo com um objeto da classe SmVR_CIGlasses.
// Create an
object to represent the device
SmVR_CDevice *Iglasses;
//
initialize the tracker device
Iglasses = new
SmVR_CIGlasses();
Iglasses->Init("COM1");
// defines the
serial port to
// be used to read the object
1.1
Ligação de um objeto com
o dispositivo
A seguir deve-se criar um
objeto SmVR_CGeometricObject
que
irá ser afetado pelo tracker dentro do
programa.
Este objeto deve ser tratado
como um objeto
qualquer do SmallVR. Entretanto, não se deve aplicar a ele
transformações
geométicas que sobreponham as
transformações a serem
lidas do dispositivo. No caso do Iglasses, não se deve
aplicar rotações
pois estas são geradas pelo equipamento.
Para efetivar a ligação
entre o objeto e o dispositivo deve-se usar o método Bind
da classe SmVR_CDevice. Neste método
informa-se o número
do tracker a ser usado e o nome do objeto que
irá ser controlado
por este dispositivo.
//
Create an object to be BIND
to the tracker
TrackerObject = new
SmVR_CGeometricObject("TrackerObject");
RootObject->AddChild(TrackerObject);
// Bind it
to Iglasses tracker number 0
Iglasses->Bind(0,
TrackerObject);
A partir deste momento o
objeto recém
"ligado"
ao tracker pode ser usado como outro objeto
qualquer da classe SmVR_CGeometricObject.
SmVR_CGeometricObject
*temp1;
temp1 = new
SmVR_CGeometricObject("Cubo UM",
DesenhaCubo);
// make an
object child of the tracked object
TrackerObject->AddChild(temp1);
1.2
Atualização dos dados do
Tracker
Periodicamente é
necessário
realizar a leitura do dispositivo a fim de manter atualizadas as
informações
geradas por ele. Para tanto usa-se o médodo UpdateAllSensors()
do
objeto que representa o dispositivo.
Uma possibilidade para manter
uma atualização
satisfatório dos dados do dispositivo é chamar
este método
na rotina de redesenho da tela, um pouco antes da chamada do
método
que redesenha os objetos. Também é possivel a
atualização de apenas
uma das cordenadas por vez, isto é feito através
do método UpdateAllSensors(int x, int y, int z)
onde são passados como parâmetro quais cordenadas
devem ser atualizadas.
No exemplo a seguir,
o dispositivo é
lido a cada frame. Se for constatado que, em face da velocidade de
leitura
do dispositivo, a taxa de atualização das imagens
tem uma
queda muito grande quando se insere o disppsitivo, pode-se controlar da
leitura a fim de realizá-la com menos
freqüência.
Isto pode ser feito por meio
de um contador
ou de um relógio que controla quando se deve ou
não ler o
dispositivo.
void display(
void )
{
glClear(
GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT
);
PosicUser();
glMatrixMode(GL_MODELVIEW);
// Atualiza a orientação do objeto preso ao óculos
// neste caso o update atualiza as informações correspondentes
// a todos os eixos de coordenadas
// pode ser do interesse do usuario impedir que o usuario olhe
// para cima ou para baixo, sendo assim ele chamaria o update
// da seguinte forma: Iglasses->UpdateAllSensors(0, 1, 1);
// ignorando assim as rotações feitas no eixo X
Iglasses->UpdateAllSensors();
RootObject->Render();
glutSwapBuffers();
}
1.3 Resetando a
posição do tracker
Para resetar a
posição do Iglasses
usa-se o método
Reset, conforme o exemplo a seguir. Este
procedimento toma como posição-zero
a atual posição
do rastreador.
case 'r':
Iglasses->Reset(NULL);
break;
No programa
apresentado neste
link tem-se um exemplo de um ambiente virtual em que o
usuário
pode "olhar para os lados" usado um óculos Iglasses.
2. Rastreador
de Posição
e Orientação Isotrack II
A
utlização do rastreador Isotrack
é idêntica a do IGlasses. A classe que o
representa na SmallVR
é a SmVR_CIsotrack. O trecho
SmVR_CDevice
*Isotrack; // define the tracker
object
// Initialize the
tracker device
Isotrack = new
SmVR_CIsotrack();
Isotrack->Init("COM1");
// Create
an object to be BIND to the tracker
TrackerObject = new
SmVR_CGeometricObject("TrackerObject");
RootObject->AddChild(TrackerObject);
// Bind it
to Isotrack tracker number 1
Isotrack->Bind(0,
TrackerObject);
Isotrack->Reset(NULL);
Hand = new
SmVR_CGeometricObject("Hand", DesenhaCubo);
Hand->SetRenderFunctionData(Verde);
Hand->TranslateBy(0,0,0);
// Make the
'Hand' object child of the tracked
object
TrackerObject->AddChild(Hand);
No programa apresentado neste
link
tem-se um exemplo de um ambiente virtual em que o
usuário
pode manipular um bastão usado o rastreador Isotrack. Para
realizar a atualização dos dados do tracker pode-se, alem
de se atualizar todas as rotações e
translações, atualizar separadamente cada uma das
rotações e translaçoes nos eixos desejados com o
metodo UpdateAllSensors(int tx,int ty,int tz,int rx,int ry,int rz), onde tx, ty e tz controlam as translações nos eixos e rx, ry e rz as rotações.
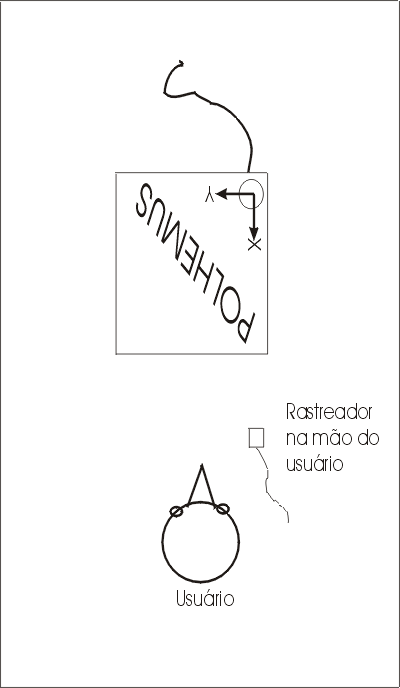
Note que o
referencial do rastreador deve
ser posicionado conforma a figura abaixo.
3. FakeTracker
O FakeTracker é uma
aplicação que simula o uso de um Rastreador de Posição e serve para se
testar aplicações que fazem uso de algum dispositivo de
rastreamento quando o mesmo não está disponivel.
Sua utlização
é idêntica a do IsoTrack. A unica
modificação que deve ser feita para se utliza-lo
é
a mudança do construtor do objeto que representa o rastreador na aplicação.
A classe que o representa na
SmallVR
é a SmVR_CFakeTracker. O trecho de código abaixo exemplifica a inicialização do FakeTracker.
SmVR_CDevice
*FakeTracker; // define the tracker
object
// Initialize the
tracker device
FakeTracker = new SmVR_CFakeTracker();
FakeTracker->Init("COM1");
Após a
inicialização de um programa com o FakeTracker,
sera
iniciada, junto a aplicação principal, uma
aplicação que é a interface do
FakeTracker. Esta
interface serve para controlar até dois sensores,
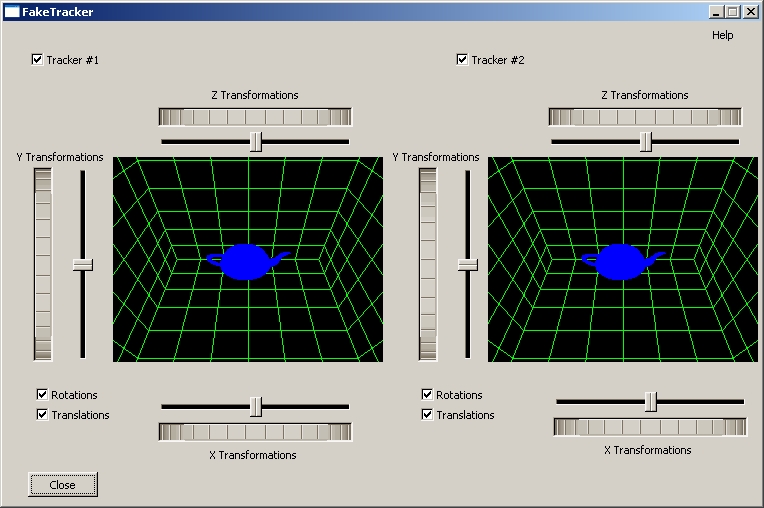
Os botões de
scrool servem para
realizar as rotações nas coordenadas, e os
botões
do tipo slider servem para realizar as
translações.